Raif Karaahmetoğlu
Software Control Developer
I am a dedicated mechatronics engineer with a deep commitment to the core pillars of mechatronics: mechanical design, control systems and software development. My expertise includes the design of complex mechanical systems, the development of advanced algorithms and the implementation of sophisticated control strategies. I enjoy my ability to adapt quickly and continually expand my knowledge to integrate the latest software design principles and deliver innovative, high impact solutions.

Projects
Return Back
GCDC
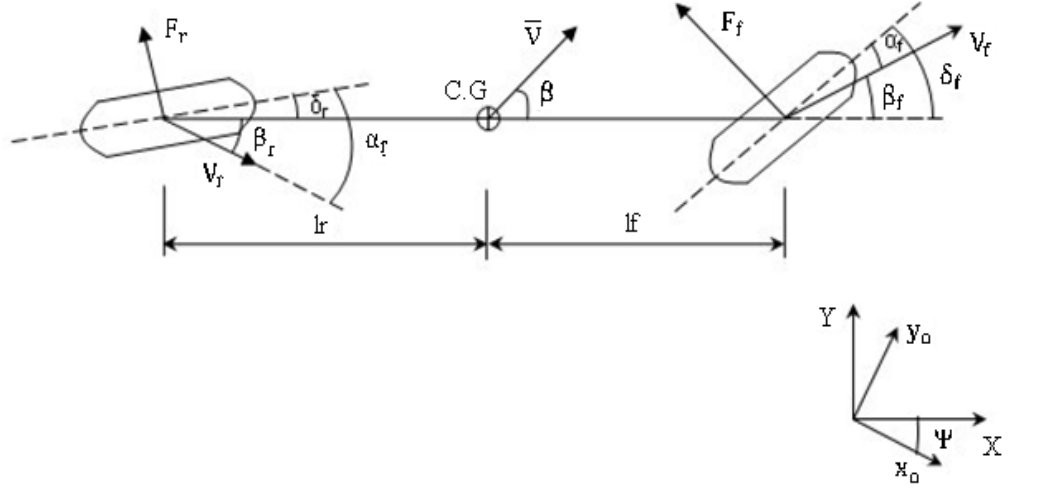
The Grand Cooperative Driving Challenge (GCDC) is a prestigious European competition that showcases the capabilities of autonomous vehicles in cooperative driving scenarios. The challenge aims to demonstrate the feasibility of multiple autonomous vehicles working together via wireless communication on public roads. This competition not only highlights advancements in autonomous driving technology but also emphasizes the importance of vehicle-to-vehicle communication for enhancing road safety and traffic efficiency. In the competition, the teams used a self-developed Co-operative Adaptive Cruise Control (CACC) with vehicle-to-vehicle communication. The vehicles in the competition followed each other autonomously in a convoy, using information received from the vehicles ahead and the lead vehicle via inter-vehicle communication modems. During the autonomous chase, the vehicles automatically accelerated and braked without driver intervention. We stopped automatically at red lights and started automatically at green lights by communicating with roadside modems providing traffic light and speed limit information. We automatically obeyed the various speed limits on the road. During the competition, a total of 20 race laps were completed on the 6km track on the A270 motorway, with a speed limit of 100km/h. The task involved designing and manufacturing mechanical parts, such as a brake system actuator and fixtures for mounting devices in the vehicle. The vehicle was tested in OTAM laboratories to obtain engine and brake maps for controller design. A vehicle dynamics model and longitudinal controller for regulating throttle and brake efforts were established. An LQR-based control algorithm was developed to control the longitudinal motion of the vehicle, with the main goal of maintaining the safest possible distance between preceding vehicles. Team Mekar finished 7th overall out of 11 teams. The control algorithm we used was very successful in following the previously unknown and very challenging speed profile of the lead car and was highly praised. We finished 5th out of 11 teams in following the speed profile of the lead car.


Skills
Contact Me
© 2025 All rights reserved.
Thanks for visiting! Feel free to connect with me.